Vari sono gli ambiti applicativi di automazione in cui un sistema cartesiano può rappresentare secondo Rollon una soluzione altrettanto valida, se non più favorevole, rispetto al ricorso a robot antropomorfi.
Ciò dipende da una serie di condizioni operative, o di layout produttivo, che ne consigliano l’impiego, espressamente quando ci si trova di fronte a lunghe linee di produzione con diverse stazioni attraversate da semi-lavorati, o con layout con spazio limitato a bordo macchina, ma con la possibilità di escursioni verticali. E’ sicuramente il caso di una serie di settori industriali, come packaging, lavorazione lamiera, logistica, food & beverage, automotive e verniciatura.
Rollon rileva quindi innanzitutto come i sistemi automatizzati lineari cartesiani garantiscano massimi risultati e prestazioni nei casi in cui l’applicazione richieda una movimentazione lineare su un’area di lavoro estesa, ampia e multi-stazione. In una tale situazione, sarebbero molti i robot antropomorfi da installare e mantenere per svolgere lo stesso lavoro di asservimento di un solo cartesiano, facendo di quest’ultimo la soluzione economicamente più efficiente. In grado peraltro di asservire produzioni multi-stazione senza mai interrompere il proprio lavoro, muovendosi anzi da un punto all’altro del processo laddove serve movimentazione o asservimento.
 Altro requisito che fa propendere per la soluzione cartesiana è quindi la necessità di lasciare libero da ingombri lo spazio di asservimento di una linea, così come la necessità di movimentare carichi molto importanti sull’asse Z, nettamente superiori alle capacità di un robot antropomorfo. Modalità che consente inoltre di liberare l’area di lavoro, facendo ‘scomparire’ dalla macchina asse e utensile, mantenendo il carico fermo nella posizione richiesta assicurando precisione e ripetibilità, senza rinunciare a dinamiche decisamente elevate.
Altro requisito che fa propendere per la soluzione cartesiana è quindi la necessità di lasciare libero da ingombri lo spazio di asservimento di una linea, così come la necessità di movimentare carichi molto importanti sull’asse Z, nettamente superiori alle capacità di un robot antropomorfo. Modalità che consente inoltre di liberare l’area di lavoro, facendo ‘scomparire’ dalla macchina asse e utensile, mantenendo il carico fermo nella posizione richiesta assicurando precisione e ripetibilità, senza rinunciare a dinamiche decisamente elevate.
La soluzione cartesiana, inoltre, soddisfa anche l’esigenza di movimentazioni indipendenti su un medesimo asse che possono risultare necessarie per ottimizzare il ciclo di lavoro. La movimentazione sui 3 assi X, Y, Z può infatti essere impostata secondo singole esigenze di spostamento e asservimento allo stesso tempo o, come detto, in maniera autonoma. Questa opportunità è data dall’uso di soluzioni multi-carro capaci di movimentare i carichi di lavoro singolarmente o a gruppi di più unità, alimentando in maniera differente – e specifica – diverse aree del processo produttivo. Ad esempio, è possibile sfruttare una trasmissione a cremagliera sull’asse Y con asse X sincronizzato e Z indipendente o altre combinazioni specifiche muovendo anche 14 carri nel medesimo processo o istante, in funzione dell’applicazione progettata e avviata.
Infine, altra variabile da tenere in considerazione sono la semplicità di montaggio e manutenzione. Malgrado infatti la costruzione di una soluzione cartesiana abbia un costo di base più elevato rispetto a un singolo robot antropomorfo (rapporto che decresce però al numero di unità necessarie per asservire più stazioni), la manutenzione risulta più semplice ed economica, mettendo la gestione dei portali alla portata dei tecnici interni dell’azienda e senza ricorso al service post vendita e ai tempi e costi dell’assistenza associata a un robot antropomorfo.
Rollon sottolinea infine come la dinamicità del cartesiano venga bilanciata dalla flessibilità operativa del robot antropomorfo, osservando però anche come molto spesso i costi di riallocazione e correlata riprogrammazione e costruzione di gripper specifici abbiano una considerevole incidenza.
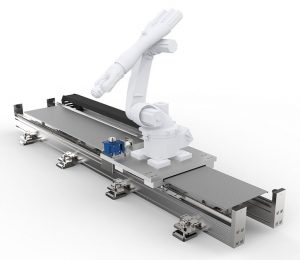 Vi è infine un campo in cui le capacità e i pregi dei due sistemi si incontrano, ovvero quando ci sono le condizioni perché un robot venga movimentato da un asse lineare esterno, diventando di fatto il settimo grado di libertà, o settimo asse. Ciò consente di ampliare l’area del lavoro del robot, tipicamente di fronte a un nuovo progetto o per incrementare le performance della linea esistente. L’impiego di un settimo asse sopperisce quindi alle carenze di tutte le soluzioni statiche.
Vi è infine un campo in cui le capacità e i pregi dei due sistemi si incontrano, ovvero quando ci sono le condizioni perché un robot venga movimentato da un asse lineare esterno, diventando di fatto il settimo grado di libertà, o settimo asse. Ciò consente di ampliare l’area del lavoro del robot, tipicamente di fronte a un nuovo progetto o per incrementare le performance della linea esistente. L’impiego di un settimo asse sopperisce quindi alle carenze di tutte le soluzioni statiche.
Un robot antropomorfo che si muove sul settimo asse può infatti:
- Incrementare la propria flessibilità, operando – nel limite del possibile e delle attività da svolgere – su più stazioni/macchine o permettendo anche a differenti robot di muoversi lungo il medesimo asse
- Incrementare resa ed efficienza (anche economica) della macchina che, muovendosi, può essere impiegata in diverse stazioni aumentando le proprie funzioni e il ritorno di investimento
- Incrementare, complessivamente, il rendimento della linea trasferendo da un punto all’altro del layout le proprie capacità operative in termini di precisione, velocità, ripetibilità.



